 Close-up of an elephant using its trunk to grip and eat food. Nature – including an elephant’s trunk – inspired the creation of a new soft fabric robotic gripper by a team of UNSW Engineering researchers, led by Dr Thanh Nho Do, Scientia Lecturer and UNSW Medical Robotics Lab director. Photo: Shutterstock
Close-up of an elephant using its trunk to grip and eat food. Nature – including an elephant’s trunk – inspired the creation of a new soft fabric robotic gripper by a team of UNSW Engineering researchers, led by Dr Thanh Nho Do, Scientia Lecturer and UNSW Medical Robotics Lab director. Photo: Shutterstock
09 NOV 2020 by Caroline Tang (UNSW Sydney)
An invention similar to an elephant’s trunk has potential benefits for many industries where handling delicate objects is essential, say the UNSW researchers who developed it.
Nature has inspired engineers at UNSW Sydney to develop a soft fabric robotic gripper which behaves like an elephant’s trunk to grasp, pick up and release objects without breaking them.
The researchers say the versatile technology could be widely applied in sectors where fragile objects are handled, such as agriculture, food and the scientific and resource exploration industries – even for human rescue operations or personal assistive devices.
Dr Thanh Nho Do, Scientia Lecturer and UNSW Medical Robotics Lab director, said the gripper could be commercially available in the next 12 to 16 months, if his team secured an industry partner.
He is the senior author of a study featuring the invention, published in Advanced Materials Technologies this month.
Dr Do worked with the study’s lead author and PhD candidate Trung Thien Hoang, Phuoc Thien Phan, Mai Thanh Thai and his collaborator Scientia Professor Nigel Lovell, Head of the Graduate School of Biomedical Engineering.
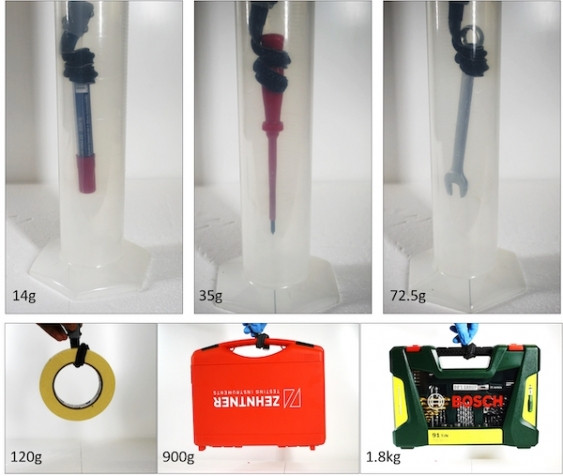
“Our new soft fabric gripper is thin, flat, lightweight and can grip and retrieve various objects – even from confined hollow spaces – for example, a pen inside a tube,” Dr Do said.
“This device also has an enhanced real-time force sensor which is 15 times more sensitive than conventional designs and detects the grip strength required to prevent damage to objects it’s handling.
“There is also a thermally-activated mechanism that can change the gripper body from flexible to stiff and vice versa, enabling it to grasp and hold objects of various shapes and weights – up to 220 times heavier than the gripper’s mass.”
Nature-inspired robotics
Dr Do said the researchers found inspiration in nature when designing their soft fabric gripper.
“Animals such as an elephant, python or octopus use the soft, continuum structures of their bodies to coil their grip around objects while increasing contact and stability – it’s easy for them to explore, grasp and manipulate objects,” he said.
“These animals can do this because of a combination of highly sensitive organs, sense of touch and the strength of thousands of muscles without rigid bone – for example, an elephant’s trunk has up to 40,000 muscles.
“So, we wanted to mimic these gripping capabilities – holding and manipulating objects are essential motor skills for many robots.”
Improvement on existing grippers
Dr Do said the researchers’ new soft gripper was an improvement on existing designs which had disadvantages that limited their application.
“Many soft grippers are based on claws or human hand-like structures with multiple inward-bending fingers, but this makes them unsuitable to grip objects that are oddly shaped, heavy or bulky, or objects smaller or larger than the gripper’s opening,” he said.
“Many existing soft grippers also lack sensory feedback and adjustable stiffness capabilities, which means you can’t use them with fragile objects or in confined environments.
“Our technology can grip long, slender objects and retrieve them from confined, narrow spaces, as well as hook through holes in objects to pick them up – for example, a mug handle.”
Lead author Trung Thien Hoang said the researchers’ fabrication method was also simple and scalable, which allowed the gripper to be easily produced at different sizes and volumes – for example, a one-metre long gripper could handle objects at least 300 millimetres in diameter.
During testing, a gripper prototype weighing 8.2 grams could lift an object of 1.8 kilograms – more than 220 times the gripper’s mass – while a prototype 13 centimetres long could wrap around an object with a diameter of 30 mm.
A robotic gripper lifts objects out of a tube and hooks onto other objects
 A new soft fabric robotic gripper in action, developed by a team of UNSW Sydney Engineering researchers, led by Dr Thanh Nho Do. Photo: UNSW Engineering
A new soft fabric robotic gripper in action, developed by a team of UNSW Sydney Engineering researchers, led by Dr Thanh Nho Do. Photo: UNSW Engineering
Prof. Nigel Lovell said: “We used a manufacturing process involving computerised apparel engineering and applied newly designed, highly sensitive liquid metal-based tactile sensors for detecting the grip force required.
“The gripper’s flat continuum also gives it superior contact with surfaces as it wraps around an object, while increasing the holding force.
“What’s more, the total heating and cooling cycle for the gripper to change structure from flexible to rigid takes less than half a minute, which is among the fastest reported so far.”
Integrating robotic arms and the sense of touch
Dr Do has filed a provisional patent for the new gripper, having successfully tested and validated the technology as a complete device.
He expects the gripper to be commercially available in the next 12 to 16 months, if he finds an industry partner.
“We now aim to optimise the integrated materials, develop a closed-loop control algorithm, and integrate the gripper into the ends of robotic arms for gripping and manipulating objects autonomously,” Dr Do said.
“If we can achieve these next steps, there will be no need to manually lift the gripper which will help for handling very large, heavy objects.
“We are also working on combining the gripper with our recently announced wearable haptic glove device, which would enable the user to remotely control the gripper while experiencing what an object feels like at the same time.”

UNSW Sydney (the University of New South Wales), is one of Australia’s leading research and teaching universities. UNSW offers an extensive range of undergraduate, postgraduate and research programs. They are expanding their education and reaching more students from all backgrounds and communities around the world. The main UNSW campus is located on a 38-hectare site at Kensington, seven kilometres from the centre of Sydney. Other major campuses are Art & Design in Paddington and UNSW Canberra at the Australian Defence Force Academy.
